New


ערכת למידה רובוטית של ROS לגרסאות מרובות : Yahboom מספקת 4 גרסאות לוח פיתוח של Rosmasrer X3, אתה יכול לבחור בחופשיות את Jetson Xavier NX, Jetson TX2-NX, Jetson Nano או Raspberry Pi 4
B, על סמך סוגיות הביצועים השונות של לוחות הפיתוח הללו, חלקה של הפעולה שווה לקחת בחשבון, Yahboom ממליץ על Jetson TX2-Nx חסכוני חקר מעמיק של אלגוריתמים AI ורובוטים אינטליגנטים : Rosmasrer X3 מצויד במצלמה מעמיקה, לידר ומודול אינטראקציה קולי, שיכול לממש מערכת הפעלה של ROS, ניווט מיפוי תלת מימד של RTAB, PCL Point Cont יישומים, בקרה אינטראקטיבית קולית, תכנות פייתון, פיתוח STM32, פיתוח Media
Pipe, אימוני מודל יולו, תאוצה של Tensorrt (הערה : תכונות שונות תלויות בגרסה שתבחר). חומרי קורס עשירים וצוות התמיכה המקצועי לאחר המכירה : אנו מספקים 103 קורסי וידיאו בשפה כפולה וסיוע טכני מקוון (Time Time). תוכן הקורס כולל : הרכבת Rosmaster X3, מערכת הפעלה לינוקס, קורסים של ROS ו- Open
CV, הסבר על מצלמה עומק ומיפוי לידר והסבר ניווט, מלמידה פשוטה ועד מעמיקה של מיפוי וניווט, זהו תהליך למידה מעמיק, אך אנו ממליצים כי ישנם תכנות משתמשים בסיסיים להשתמש בערכת רובוט זו. שדה יישומים : Rosmaster X3 מספק מודל חקר לאנשי מקצוע, יכול ללמוד אלגוריתמים, להשיג שטח בתחום לא ידוע, יכול ללמוד עמוקות זיהוי חזותי של AI, מחקר אוטונומי, לחקור זיהוי אובייקטים תלת -ממדיים וכו '. תצורת חומרה מעולה : גוף סגסוגת אלומיניום, 360 ° גלגלי mecanum onmnidectional, Li
Dar אופציונלי, מצלמת עומק באיכות גבוהה, מודול אינטראקציה קולית אופציונלית, לוח התפשטות מעוצב באופן מקצועי. זהו רובוט ROS מקצועי התומך בפיתוח רב יותר. משתמשים יכולים להתפתח וללמוד שוב בקורסים הקיימים. הערה : Yahboom מספקת רק סיוע טכני לקורסים קיימים. כל הפיתוח המעמיק צריך להסתיים על ידי הלקוחות עצמם. Orbslam2+מיפוי Octomap : Orb-Slam2 הוא מסגרת SLAM של קוד פתוח התומכת במצלמות Monocular, Binocular ו- RGB-D. זה יכול לחשב את תנוחת המצלמה בזמן אמת ולשחזר את הסביבה הסובבת בתלת מימד בתלת מימד בו זמנית. במצב RGB-D, ניתן להשיג את המידע בקנה מידה אמיתי. RTAB-MAP תלת ממדי מיפוי ויווט חזותי : באמצעות אלגוריתם RTAB לשילוב ראייה ורדאר, הרובוט מממש מיפוי ויזואלי תלת ממדי ויניוט ומכשולים, ותומך בהעברה גלובלית ומיקום אוטונומי. פיתוח Media
Pipe : דרך מסגרת פיתוח Media
Pipe, פונקציות גילוי ידיים, גילוי יציבה, גילוי כולל, איתור פנים, איתור תלת מימד והכרה. מיפוי וניווט של LIDAR הימנעות : זה יכול לממש GMapping, Hector, Karto, אלגוריתמי מיפוי קרטוגרף, תכנון תמיכה בנתיב, הימנעות מכשולים דינאמיים, ניווט בודד וניווט רב-נקודה. ניווט רב-רובוט : רובוטים מרובים נמצאים באותה מפה כדי להשיג ניווט בנקודה אחת, ניווט רב-נקודה והימנעות מכשולים דינאמיים. מיפוי Orbslam2 : אתחול אוטומטי לחלוטין בשיטת מיצוי תכונות אורב. ניתן להשיג נתוני תמונה / נקודה ענן ענן : מפת העומק, מפת הצבעים ומפת הענן של הנקודה של המצלמה ניתן להשיג דרך הצמתים המתאימים. בקרת סנכרון מרובי-רובוט : ידית אחת שולטת ברובוטים מרובים בזמן אמת, משלימה תנועות מסודרות ואחידות ומבין את הפונקציה של השליטה הסינכרונית. תור רב-רובוט מופע : רובוטים מרובים שומרים על שלוש תצורות בזמן אמת. RRT בוחן ובונה מפות באופן עצמאי : קבע את אזור החקירה, ומשתמש באלגוריתם RRT כדי לממש חקר ומיפוי אוטונומי, חיסכון במפות ולחזור לנקודת המקור.

1 חומר הניתן לגידול מונע את השפעות האבק, טביעות אצבעות, מים, התנגשויות ושריטות מארז הטאבלט שלנו מתאים רק ל

מסודר ויעיל כבל ניהול; מראה נקי עם מינימאלי חומרה גלוי מהחלק התחתון של משטח עבודה מהיר הר ומהיר שחרור עיצ

1 תואם עם קו רוחב דל 15 5510 5511 5505 5502 5501 5500 ודיוק 15 3540 3541 3542 3550 3551 סדרה.5 "סאטה כוננים קשיחים / עד 7.0 מ" מ גובה בלב�
קיבולת : 32 ג'יגהבתים (מודולים של 4x 8 ג'יגהבתים) סוג : DDR3 מהירות 240 פינים : 1600 מגההרץ PC312800 / (PC312800 E) סוג ECC : ECCUDIMM

מהירויות מהירות יותרClass 10 UHSI מהירות עד 100 MB / s אופטימיזציה לשימוש עם מכשירי אנדרואיד ביצועים משופרים כאש�
זה מיועד ל Mac Book Pro A1706 A1707 A1708 החבילה מגיעה עם כובע מפתח וחתיכת ציר לבן אם אינך בטוח, אנא צלם עבורנו כמה תמונ

*פטנט סיליקון שרוול כדי להגן על כונן קשיח אז את פנים מכיל פטנט סיליקון שרוול שעוטף את כונן קשיח לכל הכיוו�

18 מפתחות נגד רוח רפאים מתגים אפורים ליניאריים ושקעי החלפה חמה 3 מצבי חיבור : 2.4 גרם אלחוטי, סוג נתיקקווית ו

[האחרון והגדול ביותר] שוחרר בשנת 2022 ה Optiplex 7000 Micro Desktop הוא המהדורה האחרונה של Dell במשפחת Optiplex 7000 ומגיעה עם כ�
![סרט מגן מסך מבריק בלתי נראה מבריק תואם לאלו 1002 ליטר 10 צג מסך מגע 045337 [חבילה של 2]](/mix/naturale/folx-92/144907-סרט_מגן_מסך_מבריק_בלתי_נראה_מבריק_תואם_לאלו_1002_ליטר_10_צג_מסך_מגע_045337_[חבילה_של_2].jpg)
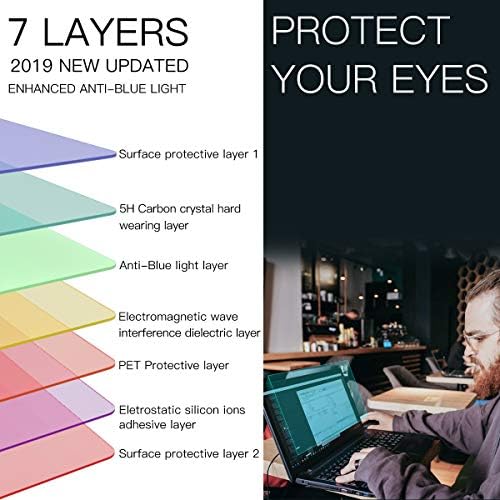
סרט מגן מסך מבריק דק במיוחד שתוכנן במיוחד עבור צג מסך המגע של אלו 1002 ליטר 10 045337 קריסטל ברור אופטי בהירות ש
עיצובים של תיק ראש מוצר מורשה רשמית של יום ירוק בניית עור בעבודת יד חריצי כרטיסים מרובים עבור תעודת זהות
![וקסון 3-חבילה מסך מגן, תואם עם אייאמה פתרון-15 פיקסלים 068-אני 7-15.6 סרט מגיני מדבקת [ לא מזג זכוכית ]](/mix/naturale/folx-92/145253-וקסון_3-חבילה_מסך_מגן,_תואם_עם_אייאמה_פתרון-15_פיקסלים_068-אני_7-15.6_סרט_מגיני_מדבקת_[_לא_מזג_זכוכית_].jpg)
שים לב כי זה מגן סרט הוא עשוי גמיש פלסטיק 99% שקיפות משמר את מקורי מסך של בהירות והגדרה 4 שעות קשיות מגן על ה

תאימות : מיועד לאייפד 97 אינץ '2018 / 2017 התקנה נטולת בועות : כל כך קל ליישום שתוכל לקבל אותה תוך שניות בלבד! רחי

ביצועים חכמים : הצטיידו בתחנת העבודה הניידת שלכם במעבדי הליבה האחרונים של אינטל מהדור ה 9 או במעבדי קסאון

חומר : בד אוקספורד מוצפן 900 ד14 אינץ ' / 15 על 24 על 8 סנטימטר תאים מרובים : 2 תאים גדולים על שמאל וימין, 1 קטן תא ב

אודות גודל אנא אשר אם גודל התרמיל עונה על הצרכים שלך לפני הרכישה אתה יכול לשאול שירות לקוחות אם יש לך שאל
מתקפל ומתכוונן : ניתן לכוונן את עמדת הטלפון הסלולרי, ניתן להאריך בקלות בגובה גם הוא מאפשר לך להתאים אישית

חבילה של 4 מדבקות! להדביק או לשתף מודפס עם אולטרה סגול (UV) דוהה דיו עמיד למים איכות הדפסה ברזולוציה גבוהה �

125% כסף מצופה ארוך תבואה נחושת מוצק ליבות מנצחים גל מולחם מחברים הסינרגיה המושלמת של ערך וביצועים...
אחריות לכל החיים של האילומישילד המובילה בתעשייה! אם מגן המסך האילומי שלך תואם לאייפוד טאץ ' של אפל (דור 6,20

חומר מארז מטען סיליקון, עשוי מחומר סיליקון באיכות גבוהה תכנון עטיפה מלאה, אנטיטיפה יעיל, אנטידבק ואנטיס�

חומר עמיד למיםמארגן אלקטרוני נסיעות זה עשוי מבד אוקספורד מוצפן עמיד במים 900 ד, עמיד ועמיד בפני שריטות איכ

תאימות רחבה זה אוזניות הטלפון הסלולרי תואם עם רוב טלפונים חכמים אנדרואידים סמסונג אייפון אייפד אייפוד א

קליפ בצורת יו : למיקרופון עיצוב קליפ בצורת יו ידידותי למשתמש להתקנה קלה ושימוש אמין, המאפשר לאסוף את המיק
100% חדש לגמרי ואיכות גבוהה החלפת סוויטאי לסוני 985 וולט 400 מחליף תקליטורים 2 חגורות סט חגורות טעינת תקליטור�
קבע שהמחשב הנייד שלך הוא מחשב נייד מסך שאינו מגע או מחשב נייד למסך מגע קבע את סוג המסך שלך הוא לוח מוגבה א�

מומלץ להפעלת מחשבים, צגים וציוד היקפי חיוני אחר להאריך את אורך של כבל חשמל קיים עבור יותר גמישות...

4 פינים : מאוורר הקירור כולל מחבר מתח בעל 4 פינים לקירור משופר וטמפרטורה מופחתת במהלך פעולה רציפה חומר עמי

מספר חלק : 092 גרם 12 שעות4 חוט 4 92 על 92 על 25 מ מ פוקסקון מאוורר קירור חדש ישן המניה ,ללא הרכבה ברגים,לא חדש לגמר

סטרימר 5 V 3 Pin Argb, תומך ב M22280 SSD, תאימות טובה מוצר זה מתאים לממשק M.2 22 x 80 מ"מ SSD הולכת חום מרובה, שיכולה לפרוק ח�